| Univerza v Ljubljani , Fakulteta za elektrotehniko | |||||||
|
|||||||
| Raziskovalni projekti so (so)financirani s strani Javne agencije za raziskovalno dejavnost. | |||||||
| Raziskovalni projekti | English version | ||||||
| Članica UL | UL Fakulteta za elektrotehniko | ||||||
| Šifra |
|
||||||
| Naziv projekta | Z umetno inteligenco podprto vodenje skupine kooperativnih in samoorganizirajočih se transportnih vozil za agilno in zahtevam prilagojeno notranjo logistiko v dinamičnem industrijskem okolju | ||||||
| Obdobje | 1.1.2025 - 31.12.2027 | ||||||
| Letni obseg |
|
||||||
| Vodja | Gregor Klančar | ||||||
| Veda |
|
||||||
| Sodelujoče RO | sodelujoče RO | ||||||
| Vsebinski opis projekta |
Cilj projekta je izboljšati sisteme za vodenje voznega parka (FMS) z avtonomnimi mobilnimi roboti (AMR) ali avtomatiziranimi vodenimi vozili (AGV)
v različnih okoljih. Namen je doseči optimalno in prilagodljivo delovanje s pomočjo naprednih algoritmov, podprtih z umetno inteligenco, ter
celovitimi in realističnimi orodji za primerjalno analizo (ang. benchmark).
Projekt je razdeljen na tri faze. Prva faza se osredotoča na nadgradnjo algoritmov za večagentno iskanje poti (MAPF) in avtomatsko generiranje
zemljevidov povezav, konča pa se z ovrednotenjem delovanja skupine vozil v statičnih okoljih. Druga faza bo razširila projekt na dinamična okolja, pri
čemer upošteva dinamične ovire in optimizacijo za spreminjajoče se razmere, kar bo ovrednoteno s pomočjo orodji za primerjalno analizo. Tretja,
hkrati zadnja faza, se bo osredotočila na delovanje v realnem času v dinamičnih okoljih z uporabo digitalnega dvojčka za razumevanje situacij in
prilagajanje delovanja.
Izboljšave sistema za vodenje voznega parka (FMS) vključujejo prioritetni in blizu optimalni algoritem MAPF, ki upošteva dinamična okolja, ter razvoj
sistema za avtomatizirano gradnjo in izboljšanje pravil gibanja (zemljevid cest oz. graf prehajanja stanj). Dodatno bomo z optimizacijo postavitve
okolja določili strateške lokacije polnilnih postaj ter definirali tlorise zemljevidov s koridorji, ki omogočajo učinkovito delovanja celotnega delovnega
procesa.
Integracija umetne inteligence se osredotoča na sprotno spremljanje okolice AGV-ja, zmanjšanje računske zahtevnosti z omogočenim lokalnim
avtonomnim delovanjem AGV-ja za reševanje konfliktov. Z analizo občutljivosti in tveganja bomo identificirali kritična mesta v zemljevidih in v
delovanju algoritmov, medtem ko računanje na robu omogoča lokalno spremljanje dinamičnega okolje, izboljša robustnost ter prispeva k splošni
prilagodljivosti sistema MAPF. Porazdeljeni sistemi planiranja in odločanja izboljšujejo usklajenost delovanja večagentnega sistema, saj z lokalnimi reševanjem konfliktov, zmanjševanjem zamud in odpravljanja zastojev poskrbijo za nemoteno izvajanje globalnih planov. Uveden digitalni dvojček bo omogočil sprejemanje primernejših odločitev z uporabo razvitih modelov in simulacije za adaptivno delovanje na spreminjajoče razmere.
Za zagotovitev učinkovitost vpeljanih pristopov bodo razvita napredna orodja za primerjavo in ovrednotenje delovanja algoritmov MAPF. Ta orodja bodo presegala že uveljavljena, ki so večinoma namenjena pristopom z mrežno predstavitvijo okolja. Razvili bomo orodje za primerjalno analizo algoritmov MAPF, ki temelji na grafih, s ciljem vključitve realističnih scenarijev. Dodatno bo narejeno orodje za oceno zemljevidov cest glede na določen tloris in specifične lastnosti intralogističnega problema. Na koncu bo razvito obsežno orodje, ki bo integriralo rešitve ostalih delovnih paketov projekta v osrednjo platformo za sistematično načrtovanje in vrednotenje sistemov z AGV-ji in AMR-ji.
Skupni cilj projekta je torej izboljšati vodenje skupine transportnih vozil v intralogističnem sistemu s kombiniranjem naprednih algoritmov, sistemov podprtih z umetno inteligenco, in inovativnih orodij za primerjalno analizo, s čimer želimo zagotovili prilagodljivost, učinkovitost in robustnost delovanje v različnih operativnih scenarijih.
Projekt združuje skupine treh projektnih partnerjev: 1. Fakultete za elektrotehniko (FE), Univerze v Ljubljani (UL), ki se ukvarja z mobilno robotiko, planiranjem poti, vodenjem robotov in metodami napovedovanja, 2. Fakultete za strojništvo (FS), UL, ki se ukvarja s porazdeljenim vodenjem in aplikacijami umetne inteligence v proizvodnih sistemih in 3. podjetja Epilog d.o.o., vodilno slovensko podjetje, ki razvija avtonomne mobilne robote in programje za intralogistiko vodenja skladišč, logističnih procesov materiala ter vodenja flote avtonomnih mobilnih robotov. Nedavno je podjetje razvilo tudi zmogljivo avtonomno mobilno robotsko platformo. |
||||||
| Sestava projektne skupine | link na sicris | ||||||
| Delovni paketi projekta in njihova realizacija |
Aplikativni raziskovalni projekt je predviden v trajanju treh let oz. 36 mesecev. Projekt je razdeljen na pet delovnih paketov (WP), vsak pa nadalje na več nalog (T). Paket WP1 definira aktivnosti povezane z vodenja projekta. Ostali paketi (WP2 do WP4) specificirajo cilje, naloge, rezultate in mejnike. Paket WP5 pa dodatno specificira aktivnost povezane z diseminacijo rezultatov. Delovni paketi so naslednji:
WP1: Project Management WP2: Upgrades of Fleet Management System for Greater Capacity, Universality, and Adaptability WP3: Artificial Intelligence for Situation Reasoning and Adaptive Behaviour in Dynamic Environment WP4: Advanced Benchmarking and Evaluation WP5: Dissemination The work logic is presented in figure below. The project starts by addressing and improving algorithms for MAPF (T2.1, T3.1) and automatic route generation (T2.3) as well as by developing new corresponding benchmarks (T4.1). The first phase finishes with a validation of efficient fleet operation in static environments. In the second phase, the project will extend to dynamic environments which includes both environments with dynamic obstacles (T2.2, T3.2) as well as changing (and optimizing) environments (T2.4). This phase competes with a validation of operation in dynamic environments with developed benchmarks (T4.2). The third phase of the project then focuses on supporting real-life dynamic environments with real-time operation (T3.3). This will be based on digital twins (T3.4) and evaluated based on integrated benchmarks (T4.3). 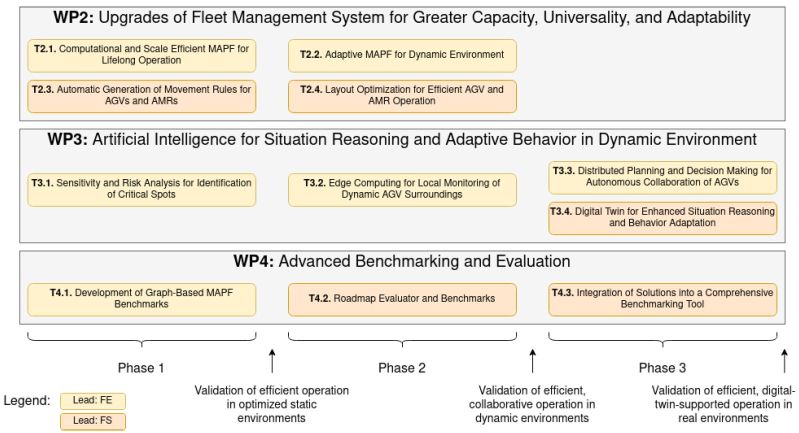
The following is a detailed description of the objectives, the tasks and results for each project package. ______________________________________________________________ 1. WORK PACKAGE (WP1): Project Management 1.1 Objectives WP1: Under the work package, work organization and research activities are carried out, work progress is monitored, implementation problems are identified, and appropriate actions are formulated. In evaluating the adequacy of implementation, we will introduce measures such as standardized performance (activities performed according to the schedule), time compliance with the plan, evaluation of the effort required to use the solution in the following work packages and the target application, solution efficiency compared to those existing in the company, quality of the reports and possibility of use for dissemination purposes (WP5). 1.2 Tasks WP1: T1.1. Coordination of project activities (FE, FS, Epilog),[m1-m36] T1.2. Coordination of research activities (FE, FS), [m1-m36] T1.3. Quality assurance (FE, FS, Epilog):[m1-m36] 1.3 Results WP1: D1.1. - D1.6. Periodic report on activities performed, resources used, achievements, and risk assessment. [m6, m12, m18, m24, m30, m36] ______________________________________________________________ 2. WORK PACKAGE (WP2): Upgrades of Fleet Management System for Greater Capacity, Universality, and Adaptability 2.1 Objectives WP2: The work package strives towards enhancing the performance and robustness of Fleet Management System (FMS) that minimize time and energy to improve overall capacity, make solutions universal for various common requirements and enable on-demand system adaptability. The focus is on prioritized near-optimal Multi-Agent Path Finding (MAPF) that can achieve real-time performance with guaranteed completeness (T2.1). The proposed methods should also be capable of taking into account dynamically changing environmental conditions (T2.2). The plans should also be robust to unforeseen events, suboptimal solutions can be improved iteratively and the planning domain could be partitioned in order to enhance efficiency and scalability. Another objective is to develop a system for automatic generation and improvement of movement rules (T2.3). The aim is also to develop a system for auto-generative design of the entire layout with optimal positions of charging and workstations that enable the most suitable and efficient operation of the entire work process (T2.4). 2.2 Tasks WP2: T2.1. Computational and Scale Efficient MAPF for Lifelong Operation (FE), [m1-m15] T2.2. Adaptive MAPF for Dynamic Environment (FE), [m15-m29] T2.3. Automatic Generation of Movement Rules for AGVs and AMRs (FS), [m1-m15] T2.4. Layout Optimization for Efficient AGV and AMR Operation (FS),[m15-m29] 2.3 Results WP2: D2.1. Algorithm for lifelong MAPF with robust conflict prevention (software, paper). [m15] D2.2. System for adaptive operation in dynamic environments. (software, paper). [m29] D2.3. Transformer-based RL system for automatic generation of movement rules for AGVs and AMRs (software, paper). [m15] D2.4. A method for layout optimization including charging station and safe zone placement (software, paper). [m29] ______________________________________________________________ 3. WORK PACKAGE (WP3): Artificial Intelligence for Situation Reasoning and Adaptive Behaviour in Dynamic Environment 3.1 Objectives WP3: The objective of this package is to develop several AI-powered systems that support, enhance and optimize performance, robustness and adaptability of the complete MAPF system. The bottlenecks, safety margins and other critical spots can be determined based on the analysis of all plans (T3.1) to make MAPF (T2.1) more robust to unforeseen events and therefore prevent or at least reduce probability of congestion, delay and downtime. This also includes a system for monitoring of dynamic AGV surrounding (T3.2) that provides data to dynamic MAPF (T2.2). To mitigate the computational burden and increase performance of the MAPF the AGVs should solve some local planning challenges autonomously (T3.3). Important aspect is also to ensure long-term optimality and adaptability to varying environmental conditions. This can be achieved with a digital twin that helps make more informed decisions (T3.4). 3.2 Tasks WP3: T3.1. Sensitivity and Risk Analysis for Identification of Critical Spots (FE), [m3-m14] T3.2. Edge Computing for Local Monitoring of Dynamic AGV Surrounding (FE), [m13-m24] T3.3. Distributed Planning and Decision Making for Autonomous Collaboration of AGVs (FE), [m25-m36] T3.4. Digital Twin for Enhanced Situation Reasoning and Behavior Adaptation (FS), [m25-m36] 3.3 Results WP3: D3.1. Sensitivity analysis and risk identification (software and report). [m14] D3.2. System for local monitoring of dynamic AGV surrounding (software and documentation). [m24] D3.3. System for distributed planning and decision making of AGVs (software and paper). [m36] D3.4. Digital twin for enhanced situation reasoning and behavior adaptation (software and report). [m36] ______________________________________________________________ 4. WORK PACKAGE (WP4): Advanced Benchmarking and Evaluation 4.1 Objectives WP4: This work package aims to develop and implement advanced benchmarking and evaluation tools for AGV and AMR systems. The goals include moving beyond conventional grid-based approaches by introducing graph-based models in MAPF benchmarks, creating scenarios that resemble real-life situations. This includes the development of a roadmap evaluation tool with a separate but compatible set of benchmarks, aimed at evaluating roadmap solutions for particular layouts and specifics of the intralogistic problem. Furthermore, the work package will integrate solutions from other WPs into a comprehensive benchmarking tool, establishing a central platform for the systematic design and evaluation of AGV and AMR systems. 4.2 Tasks WP4: T4.1. Development of Graph-Based MAPF Benchmarks (FE/FS), [m11-m22] T4.2. Roadmap Evaluator and Benchmarks (FS), [m20-m31] T4.3. Integration of Solutions into a Comprehensive Benchmarking Tool (FS), [m25-m36] 4.3 Results WP4: D4.1. Graph-Based MAPF benchmark (various scenarios and documentation) [m22] D4.2. Roadmap evaluation tool and benchmark (software package and documentation) [m31] D4.3. Integrated tool for configuration and testing of FMS (software and documentation) [m36] ______________________________________________________________ 5. WORK PACKAGE (WP5): Dissemination 5.1 Objectives WP5: This work package will transfer gained knowledge among project participants e.g. to Epilog employees and through pedagogical methods and thesis supervision at both faculties. The research findings will be communicated also to a broad audience, both domestically and internationally, encompassing professionals (companies) as well as the academic community (through articles and conferences). Dissemination will also be through applications, starting with benchmark tool design and providing demonstration applications and potentially leading to the commercialization of developed solutions. 5.2 Tasks WP5: T5.1. Dissemination activities (FE, FS, Epilog), [m1-m36] T5.2. Application activities (Epilog, FS, FE), [m1-m36] 5.3 Results WP5: D5.1. Review and assessment of industrial applicability of solutions (report). [m36] |
||||||
| Bibliografske reference | link na sicris | ||||||
