| University of Ljubljana , Faculty of Electrical Engineering | |||||||
|
|||||||
| Research projects (co)funded by the Slovenian Research Agency . | |||||||
| Project | Slovenska verzija | ||||||
| Member of University of Ljubljana | UL Faculty of Electrical Engineering | ||||||
| Code |
|
||||||
| Project | AI-Enhanced Fleet Management of Collaborative and Self-Organizing Transportation Vehicles for Agile and Demand-Driven Internal Logistics in Dynamic Industrial Environment | ||||||
| Period | 1.1.2025 - 31.12.2027 | ||||||
| Range on year |
|
||||||
| Head | Gregor Klančar | ||||||
| Research activity |
|
||||||
| Research Organisation | link on SICRIS | ||||||
| Abstract |
This project aims to improve Fleet Management Systems (FMS) with Autonomous Mobile Robots (AMR) or Automated Guided Vehicles (AGV) in different environments. The objective is to achieve optimal and adaptable operation through advanced algorithms supported by artificial intelligence, along with comprehensive and realistic benchmarks.
The project is divided into three phases. The first phase focuses on improvement of Multi-Agent Pathfinding (MAPF) algorithms and the automatic generation of roadmaps, concluding with the validation of fleet operation efficiency in static environments. In the second phase, the project will be extended to dynamic environments, considering dynamic obstacles and optimization for changing conditions, which will be complemented by benchmark validation. The third and final phase will focus on real-time operation in dynamic environments using a digital twin for situational reasoning and adaptive behavior.
Improvements to the Fleet Management System (FMS) include a prioritized and near-optimal MAPF algorithm that considers dynamic environments, and the development of a system to automatically generate and improve movement rules (roadmap). In addition, layout optimization aims to strategically position charging stations and design efficient operational layouts.
The integration of Artificial Intelligence (AI) into the project focuses on monitoring the AGV's environment, reducing the computational complexity through enabled local autonomous AGV operation for conflict resolution. Sensitivity and risk analysis will identify critical spots in maps and algorithms operation, while edge computing facilitates local monitoring of the dynamic environment, contributing to the overall adaptability of the MAPF system. Distributed planning and decision-making systems improve the collaboration between AGVs, ensuring smooth execution of global plans by solving conflicts locally, reducing delays, and eliminating bottlenecks. The introduced digital twin will improve decision making by using developed models and simulations for adaptive responses to changing conditions.
To ensure the effectiveness of the introduced approaches, advanced benchmarking and evaluation tools will be developed that go beyond traditional grid-based approaches. We will develop graph-based MAPF benchmarks, aiming to incorporate realistic scenarios. Additionally, a roadmap evaluation tool will be created to assess roadmaps for a given layout and specific features of the intralogistics problem. Finally, a comprehensive benchmarking tool will be developed, integrating solutions from other work packages into a central platform for systematic design and validation of systems with AGVs and AMRs.
The overall goal of the project is, therefore, to improve AMRs or AGVs fleet management by combining advanced algorithms, AI-supported systems, and innovative benchmarks tools. This aims to ensure adaptability, efficiency, and robustness of operations in various operational scenarios.
The project brings together groups from three project partners: 1. The Faculty of Electrical Engineering (FE), the University of Ljubljana (UL), which deals with mobile robotics, route planning, robot control and prediction methods, 2. The Faculty of Mechanical Engineering (FS), UL, which deals with distributed control and artificial intelligence applications in production systems, and 3. The company Epilog d.o.o., a leading Slovenian company developing autonomous mobile robots and software for warehouse intralogistics, logistic process management, and fleet management of autonomous mobile robots. |
||||||
| Researchers | link on SICRIS | ||||||
| Work packages of the project and their realization |
The duration of the applied research project is three years or 36 months. The project is divided into five work packages (WPs), which are in turn divided into several tasks (T). The WP1 package defines activities related to project management. The other packages (WP2 to WP4) specify the objectives, tasks, deliverables and milestones. The WP5 package additionally specifies the activities related to the dissemination of the deliverables. Work packages are:
WP1: Project Management WP2: Upgrades of Fleet Management System for Greater Capacity, Universality, and Adaptability WP3: Artificial Intelligence for Situation Reasoning and Adaptive Behaviour in Dynamic Environment WP4: Advanced Benchmarking and Evaluation WP5: Dissemination The work logic is presented in figure below. The project starts by addressing and improving algorithms for MAPF (T2.1, T3.1) and automatic route generation (T2.3) as well as by developing new corresponding benchmarks (T4.1). The first phase finishes with a validation of efficient fleet operation in static environments. In the second phase, the project will extend to dynamic environments which includes both environments with dynamic obstacles (T2.2, T3.2) as well as changing (and optimizing) environments (T2.4). This phase competes with a validation of operation in dynamic environments with developed benchmarks (T4.2). The third phase of the project then focuses on supporting real-life dynamic environments with real-time operation (T3.3). This will be based on digital twins (T3.4) and evaluated based on integrated benchmarks (T4.3). 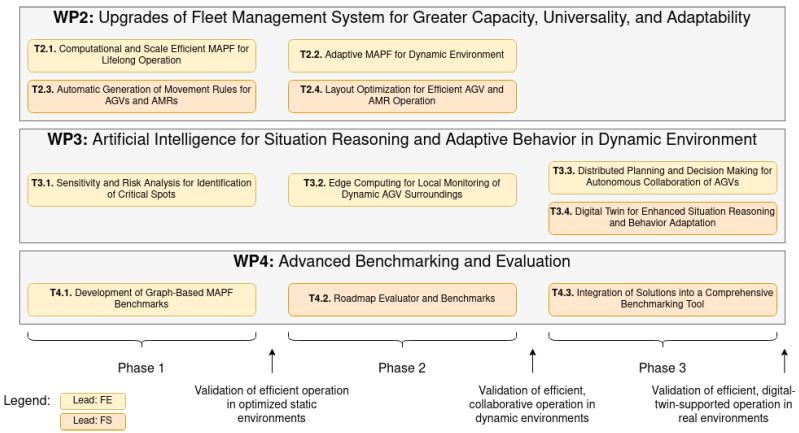
The following is a detailed description of the objectives, the tasks and results for each project package. ______________________________________________________________ 1. WORK PACKAGE (WP1): Project Management 1.1 Objectives WP1: Under the work package, work organization and research activities are carried out, work progress is monitored, implementation problems are identified, and appropriate actions are formulated. In evaluating the adequacy of implementation, we will introduce measures such as standardized performance (activities performed according to the schedule), time compliance with the plan, evaluation of the effort required to use the solution in the following work packages and the target application, solution efficiency compared to those existing in the company, quality of the reports and possibility of use for dissemination purposes (WP5). 1.2 Tasks WP1: T1.1. Coordination of project activities (FE, FS, Epilog),[m1-m36] T1.2. Coordination of research activities (FE, FS), [m1-m36] T1.3. Quality assurance (FE, FS, Epilog):[m1-m36] 1.3 Results WP1: D1.1. - D1.6. Periodic report on activities performed, resources used, achievements, and risk assessment. [m6, m12, m18, m24, m30, m36] ______________________________________________________________ 2. WORK PACKAGE (WP2): Upgrades of Fleet Management System for Greater Capacity, Universality, and Adaptability 2.1 Objectives WP2: The work package strives towards enhancing the performance and robustness of Fleet Management System (FMS) that minimize time and energy to improve overall capacity, make solutions universal for various common requirements and enable on-demand system adaptability. The focus is on prioritized near-optimal Multi-Agent Path Finding (MAPF) that can achieve real-time performance with guaranteed completeness (T2.1). The proposed methods should also be capable of taking into account dynamically changing environmental conditions (T2.2). The plans should also be robust to unforeseen events, suboptimal solutions can be improved iteratively and the planning domain could be partitioned in order to enhance efficiency and scalability. Another objective is to develop a system for automatic generation and improvement of movement rules (T2.3). The aim is also to develop a system for auto-generative design of the entire layout with optimal positions of charging and workstations that enable the most suitable and efficient operation of the entire work process (T2.4). 2.2 Tasks WP2: T2.1. Computational and Scale Efficient MAPF for Lifelong Operation (FE), [m1-m15] T2.2. Adaptive MAPF for Dynamic Environment (FE), [m15-m29] T2.3. Automatic Generation of Movement Rules for AGVs and AMRs (FS), [m1-m15] T2.4. Layout Optimization for Efficient AGV and AMR Operation (FS),[m15-m29] 2.3 Results WP2: D2.1. Algorithm for lifelong MAPF with robust conflict prevention (software, paper). [m15] D2.2. System for adaptive operation in dynamic environments. (software, paper). [m29] D2.3. Transformer-based RL system for automatic generation of movement rules for AGVs and AMRs (software, paper). [m15] D2.4. A method for layout optimization including charging station and safe zone placement (software, paper). [m29] ______________________________________________________________ 3. WORK PACKAGE (WP3): Artificial Intelligence for Situation Reasoning and Adaptive Behaviour in Dynamic Environment 3.1 Objectives WP3: The objective of this package is to develop several AI-powered systems that support, enhance and optimize performance, robustness and adaptability of the complete MAPF system. The bottlenecks, safety margins and other critical spots can be determined based on the analysis of all plans (T3.1) to make MAPF (T2.1) more robust to unforeseen events and therefore prevent or at least reduce probability of congestion, delay and downtime. This also includes a system for monitoring of dynamic AGV surrounding (T3.2) that provides data to dynamic MAPF (T2.2). To mitigate the computational burden and increase performance of the MAPF the AGVs should solve some local planning challenges autonomously (T3.3). Important aspect is also to ensure long-term optimality and adaptability to varying environmental conditions. This can be achieved with a digital twin that helps make more informed decisions (T3.4). 3.2 Tasks WP3: T3.1. Sensitivity and Risk Analysis for Identification of Critical Spots (FE), [m3-m14] T3.2. Edge Computing for Local Monitoring of Dynamic AGV Surrounding (FE), [m13-m24] T3.3. Distributed Planning and Decision Making for Autonomous Collaboration of AGVs (FE), [m25-m36] T3.4. Digital Twin for Enhanced Situation Reasoning and Behavior Adaptation (FS), [m25-m36] 3.3 Results WP3: D3.1. Sensitivity analysis and risk identification (software and report). [m14] D3.2. System for local monitoring of dynamic AGV surrounding (software and documentation). [m24] D3.3. System for distributed planning and decision making of AGVs (software and paper). [m36] D3.4. Digital twin for enhanced situation reasoning and behavior adaptation (software and report). [m36] ______________________________________________________________ 4. WORK PACKAGE (WP4): Advanced Benchmarking and Evaluation 4.1 Objectives WP4: This work package aims to develop and implement advanced benchmarking and evaluation tools for AGV and AMR systems. The goals include moving beyond conventional grid-based approaches by introducing graph-based models in MAPF benchmarks, creating scenarios that resemble real-life situations. This includes the development of a roadmap evaluation tool with a separate but compatible set of benchmarks, aimed at evaluating roadmap solutions for particular layouts and specifics of the intralogistic problem. Furthermore, the work package will integrate solutions from other WPs into a comprehensive benchmarking tool, establishing a central platform for the systematic design and evaluation of AGV and AMR systems. 4.2 Tasks WP4: T4.1. Development of Graph-Based MAPF Benchmarks (FE/FS), [m11-m22] T4.2. Roadmap Evaluator and Benchmarks (FS), [m20-m31] T4.3. Integration of Solutions into a Comprehensive Benchmarking Tool (FS), [m25-m36] 4.3 Results WP4: D4.1. Graph-Based MAPF benchmark (various scenarios and documentation) [m22] D4.2. Roadmap evaluation tool and benchmark (software package and documentation) [m31] D4.3. Integrated tool for configuration and testing of FMS (software and documentation) [m36] ______________________________________________________________ 5. WORK PACKAGE (WP5): Dissemination 5.1 Objectives WP5: This work package will transfer gained knowledge among project participants e.g. to Epilog employees and through pedagogical methods and thesis supervision at both faculties. The research findings will be communicated also to a broad audience, both domestically and internationally, encompassing professionals (companies) as well as the academic community (through articles and conferences). Dissemination will also be through applications, starting with benchmark tool design and providing demonstration applications and potentially leading to the commercialization of developed solutions. 5.2 Tasks WP5: T5.1. Dissemination activities (FE, FS, Epilog), [m1-m36] T5.2. Application activities (Epilog, FS, FE), [m1-m36] 5.3 Results WP5: D5.1. Review and assessment of industrial applicability of solutions (report). [m36] |
||||||
| Citations for bibliographic records | link on SICRIS | ||||||
