Mobile Robot Simulator
Mobile robot simulator is intended to study control and strategy algorithms for a group of mobile robots. Simulator models robots and ball dynamic behaviour as well as collisions between them. It is designed according to FIRA Middle MiroSot category rules. But it could also be used for general MAS related research such as strategy, cooperation, agent behavior, motion control and others. Complete download is available here. Movie examples showing simulator operation (Small MiroSot category, 3 agains 3 robots) for 2D and 3D version are also available.
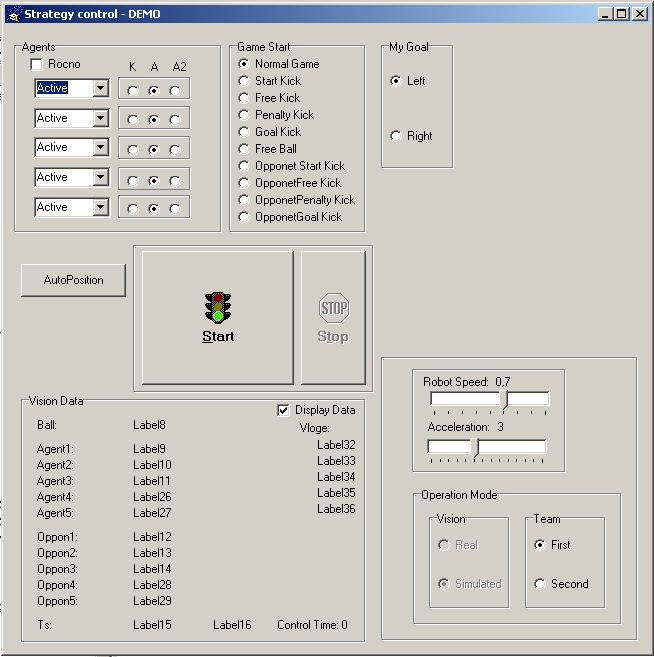
Screenshots of the simulator and control application.